📘 Chapter 4: Ripple Geometry
This lesson redefines directionality in URFT. Instead of relying on external axes or coordinate systems, direction is derived locally from the symmetry of ripple rebound within a system. A system’s “forward,” “spin,” or “alignment” emerges from how ripples enter and reflect — not from spatial orientation.
🔹 Section 1: Concept
How does a system know which way to turn — or what “turning” even means — if there are no coordinates?
In URFT, direction doesn’t come from a map. It comes from memory — from how ripples return.
In classical physics:
Direction is defined by vectors (e.g., x, y, z)
Motion and orientation require a global reference frame
In URFT:
There are no absolute directions
A system defines its own dominant rebound axes — directions of minimal distortion and maximal echo symmetry
How it works:
Rebound symmetry reveals the path of least transformation resistance
Dominant echo paths create stable orientation
Systems naturally align and rotate toward directions where ripple rebound is most coherent
🔹 Section 2: Analogy
Imagine shouting inside a cave.
In some directions, your voice returns clearly — strong echo symmetry
In others, the sound scatters or fades
You could navigate or align yourself just by rotating toward clearer echoes. In URFT, this echo-guided feedback defines direction.
Your “forward” isn’t defined by where you want to go — it’s defined by where your echoes return cleanest.
🔹 Section 3: Simulation
Simulate a single system receiving ripple inputs from various angles:
Some angles produce symmetrical rebound — minimal phase loss
Others result in distorted or absorbed return
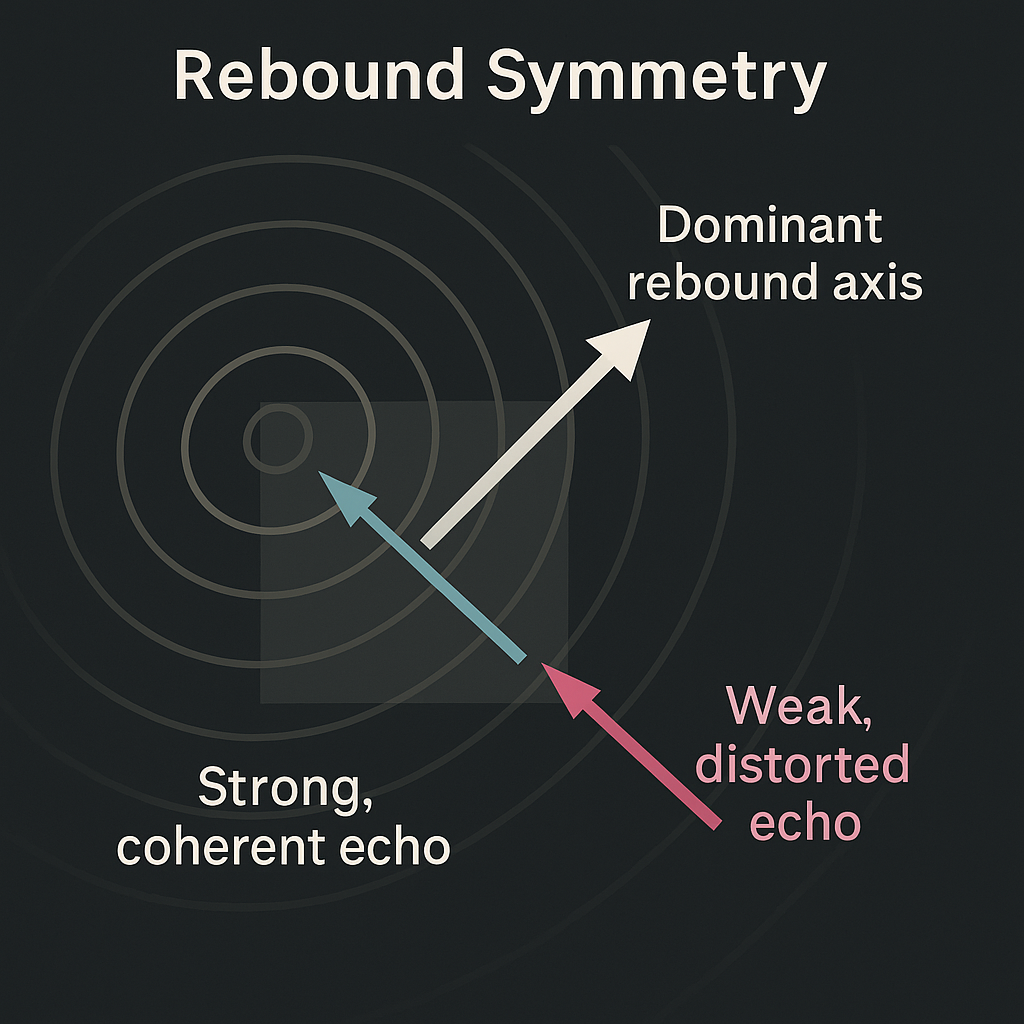
Visualize:
The system’s “direction” isn’t something we impose — it’s something the simulation reveals, based on rebound coherence.
Arrows along dominant rebound axes
Fuzzy paths where symmetry is broken
Echo pattern reveals self-defined coordinate basis for motion and rotation.
🔹 Section 4: Application
This model allows:
Directionality in isolated systems (no external reference needed)
Navigation via echo scanning — follow symmetry corridors
Rotation and alignment through feedback resonance, not torque
In chaotic or reference-less environments, this model enables stable motion and alignment purely from ripple memory.
It also models how systems maintain orientation in a ripple vacuum — crucial for early-universe, quantum, or black hole modeling.
🔹 Section 5: Definition
Rebound Symmetry Axis: A self-generated directional reference formed by the highest-fidelity rebound paths within a system. In URFT, direction arises from internal echo behavior, not coordinate placement.
In URFT, the dominant direction of a system is defined by the rebound symmetry of incoming ripples. We represent this as a normalized direction vector:
𝒟 = argmaxₐ [ EchoFidelity(θₐ) ]
Where:
θₐ is the angle of ripple impact relative to the system
EchoFidelity(θₐ) is the return-phase symmetry for that direction
𝒟 is the direction of maximal coherent rebound
This is the self-defined directional axis of the system — the direction in which incoming transformation is best preserved and returned.
Interpretive Notes:
This formulation doesn’t assume coordinates — it’s angle-relative to the system’s own geometry
argmax means “choose the angle where echo response is highest”
Can be tested in simulation: vary impact angle → measure rebound symmetry → extract preferred direction
🔹 Section 6: Test Path
Simulate ripple impact at varying angles on a system with internal asymmetries:
Measure rebound phase shift and echo symmetry
Map dominant axes of symmetry (lowest phase distortion)
Compare motion, orientation, and alignment to echo profile
This demonstrates how direction emerges without predefined axes.
Direction isn’t something a system has — it’s something it finds through echo.